It is a robotic brace for assisting, training, and studying the head-neck movement. The brace is fully wearable and offers 70% range of motion of the head-neck.
Human head has six degrees-of-freedom, predominantly rotation with a small translation. The underlying architecture uses a 3-RRS mechanism where the two revolute axes within a chain intersect at a point. The robot has three degrees of freedom with coupled translation and rotation. The final design was optimized to best fit the empirical data recorded from natural head-neck movement.
The mechanical components in the physical design were mostly 3D printed, making the device lightweight (about 1 kg). Healthy subjects achieve, on average, 70% percent range of their natural head-neck motion when wearing this robotic device. Dynamixel servo motors, which are highly back-drivable, are currently used to provide both measurement and actuation of the device. These motors allow the brace to be used in transparent, position control, and force control modes for different applications.
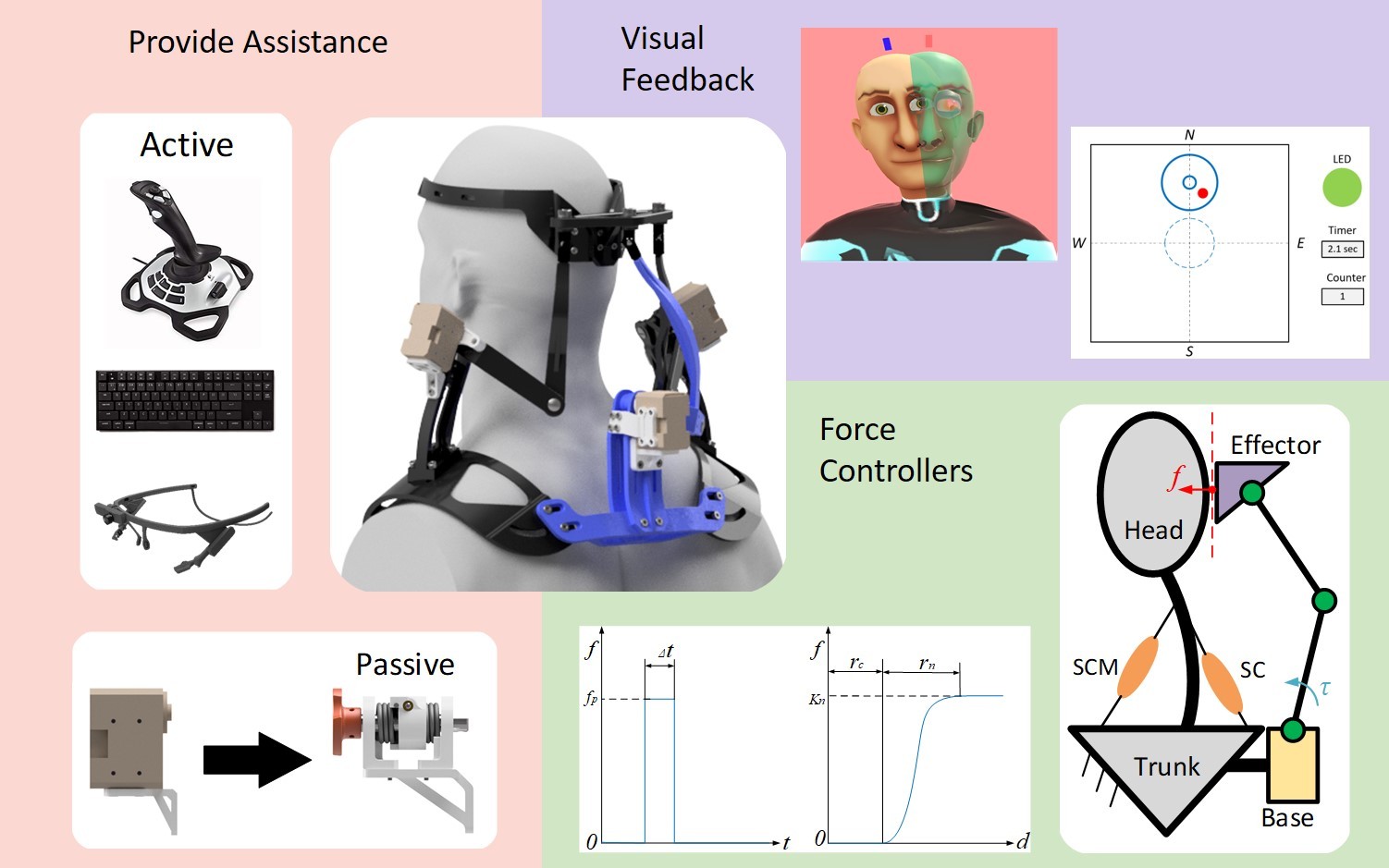
When used to provide assistance, different input devices, including joysticks, keyboards, and wearable eye-trackers, can be integrated with this robotic brace. Force/torque sensors, surface eletromyography (sEMG), and different visual displays are also available for different scientific and clinical explorations.
The use of Dynamixel servos makes the design highly back-drivable. The robot can therefore be used to measure voluntary head-neck movements in different groups.
The brace can be controlled by a user via different input devices, including joysticks, keyboards, and wearable eye-trackers.
Using a joystick, the intended angle of the head, measured by the brace, is mapped to the rotation of the stick. By rotating the stick, a user can achieve the head-neck movement.
Using the keyboards, a user clicks on different keys to incrementally move the head from the previous posture.
Using a Pupil eye-tracker, a user can move the brace through eye-gazes. This control mode was inspired by the natural head-eye coordination in human.
This section is going to be edited soon.
In the meantime, please refer to Haohan's Ph.D. dissertation.