Image Carousel with 5 slides
A carousel is a rotating set of images. Use the previous and next buttons to change the displayed slide
-
Slide 1: upper body
-
Slide 2: perturbation
-
Slide 3: gait
-
Slide 4: flat
-
Slide 5: cable
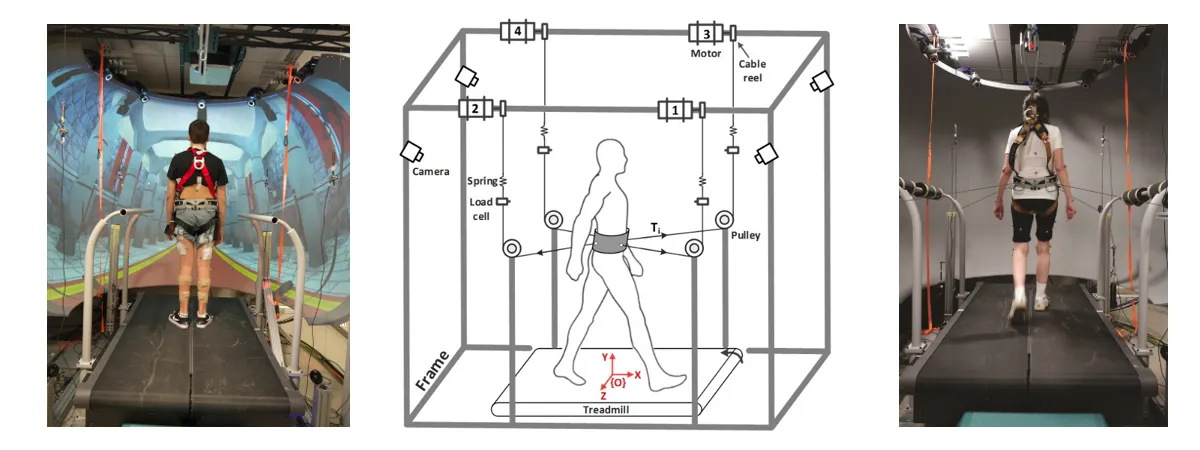

Perturbation Training
Balance training is aimed at reducing falls risk. Elderly subjects and patients with movement disorders exhibit a high risk for falling compared to their young and healthy peers. Our group has developed novel paradigms where we apply different types of perturbations while subjects are standing or walking on a treadmill. These paradigms have been used to characterize and augment stability in different population groups, including elderly, Parkinson's, Cerebellar ataxia, and others.
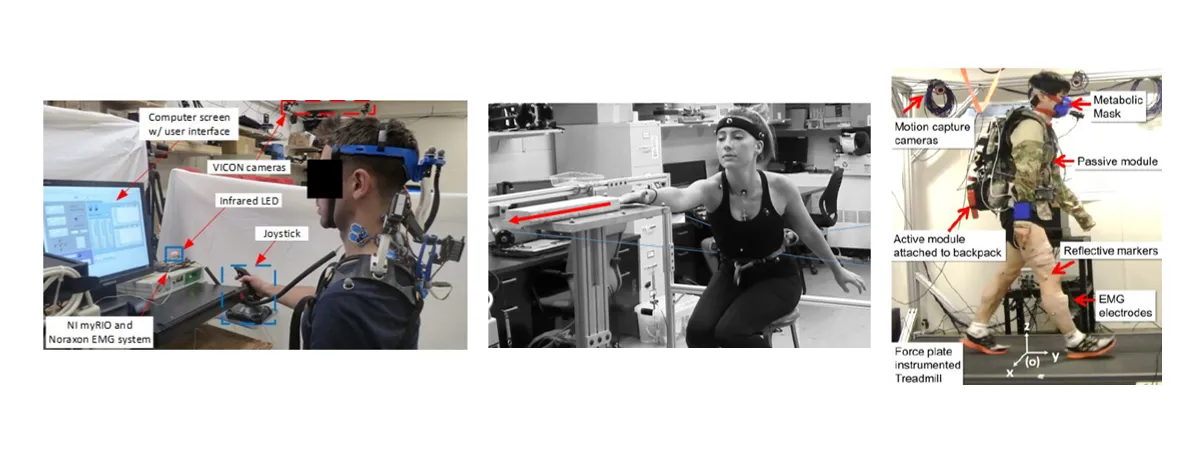
Upper Body Training
The studies are focused on characterizing, augmenting, and training movements of the upper body, such as the torso and neck. Many children are unable to keep their trunk straight without support, due to poor strength or coordination. The goal of these projects are to come up with novel methods for strengthening and training of the upper body, including the spine and the neck. Humans carry heavy backpacks, including children going to school and army personnel in the field. Our lab also looks at designs of technologies that can facilitate more efficient load carriage.
Virtual reality maze
Spatial navigation is a complex cognitive skill that depends on multiple cognitive processes. The ability to spatially navigate declines with advancing age and is further impaired with neurodegenerative disorders such as AD.
We have developed virtual reality mazes to evaluate the navigation ability in subjects, which will be used as a diagnostic tool for disease such as AD.
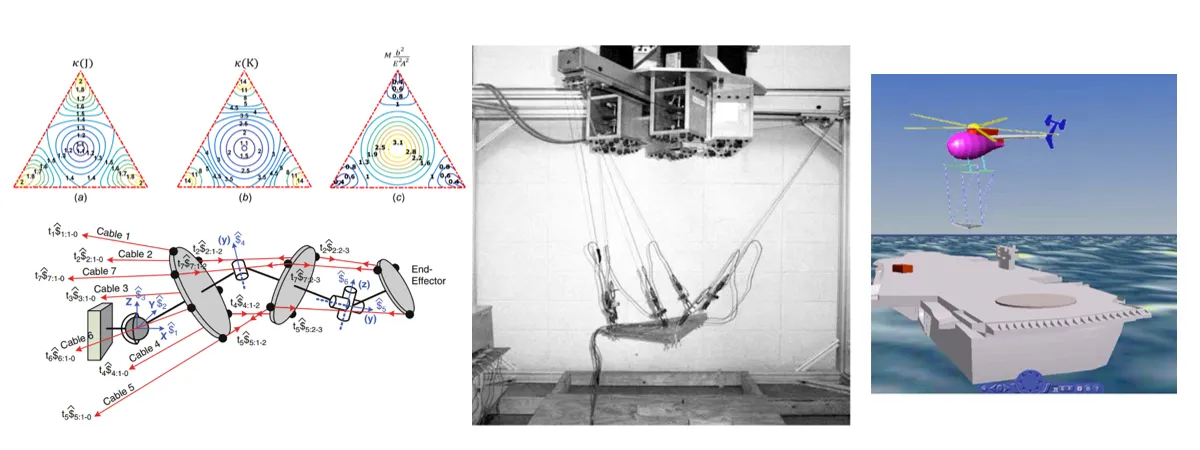
Cable-driven Systems
Robots are designed which are controlled by wires (or cables) in tension. A variety of fundamental questions in terms of design, workspace, control, human training have been addressed.
Infant Mobility
Infants and toddlers suffer from mobility impairments due to diseases such as cerebral palsy, down syndrome and others. These impairments affect the development trajectories of these infants. Lack of mobility gives them less opportunity to interact socially with others. We have shown that even 6-month old infants can learn to drive a robot through training with a force field joystick. Through well designed haptic interfaces with forces fields, these children can learn higher level behaviors such as driving in a cluttered environment and navigation to reach a goal.
Mechanism/Robot Design
Robotic designs use open and closed chain mechanisms to transmit motion from the actuators to an end-effector. Studies focus on kinematics, dynamics, and synthesis of such mechanisms.
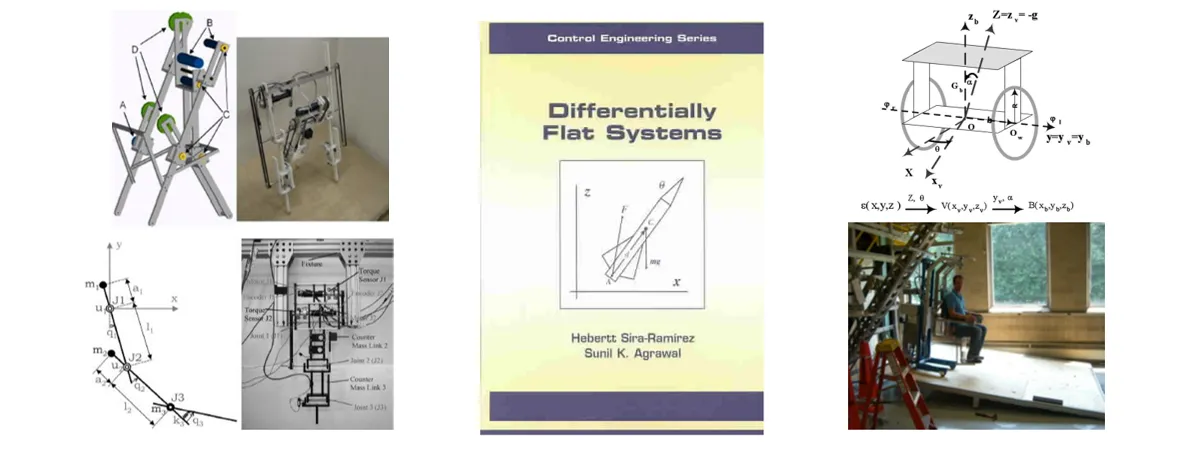
Gravity Balanced Systems
Through the addition of springs or compliant elements, mechanical systems can be designed such that the gravity's effect is removed from their components. This idea can be applied to the design of a wide range of industrial machinery and household appliances. Our laboratory has used the underlying scientific principles in the design of leg and arm orthoses for rehabilitation applications.
Differential Flatness
Classes of nonlinear dynamic systems can be transformed to linear and controllable forms using static and dynamic feedback. These structures often arise in dynamic equations of open and closed-chain robots, mobile vehicles, and chemical reactors. In some cases, the dynamic equations of a system may not naturally be in a differentially flat form. However, one can redesign a system through geometry and inertia distribution to make it in a differentially flat form.
Dynamic Optimization/Control
Dynamic systems are characterized by governing differential equations with state and input trajectories. In our lab, we study dynamic systems arising out of models of robots, manipulators, mobile vehicles, and others. The performance of such systems can be optimized using classical methods from optimal control and numerical methods to achieve computational efficiency. We have used the underlying structures of governing dynamic equations to solve these optimization problems for real-time applications in robotics.
Flapping Wings
In nature, birds and insects have developed unique capabilities to fly or hover in one place. Their wings have unique designs and cyclic patterns of movements that allow them to move gracefully while optimizing their performance. A series of studies were conducted in our laboratory to characterize the aerodynamics of flapping wings, demonstrate the effects of spatial compliance, and design flapping wing flying vehicles. A variety of flapping wing vehicles were synthesized and their behaviors were demonstrated through experiments.
Free-floating Robots
Micro-gravity and space environments pose novel questions for the design of robots and manipulators. On earth, robots are typically attached to the ground which provides a fixed support during movements. However, in space, there is no fixed ground and movements are specified by action-reaction principles. Motion planning of space robots is specially challenging due to absence of a fixed base. Our lab has developed novel motion planning methods that build upon the underlying dynamic equations of motion in the space.