 and image of a subject in MAXFAS with airsoft pistol (bottom)")




, stiffness (b), magnitude (c) of a cable-driven robot workspace")


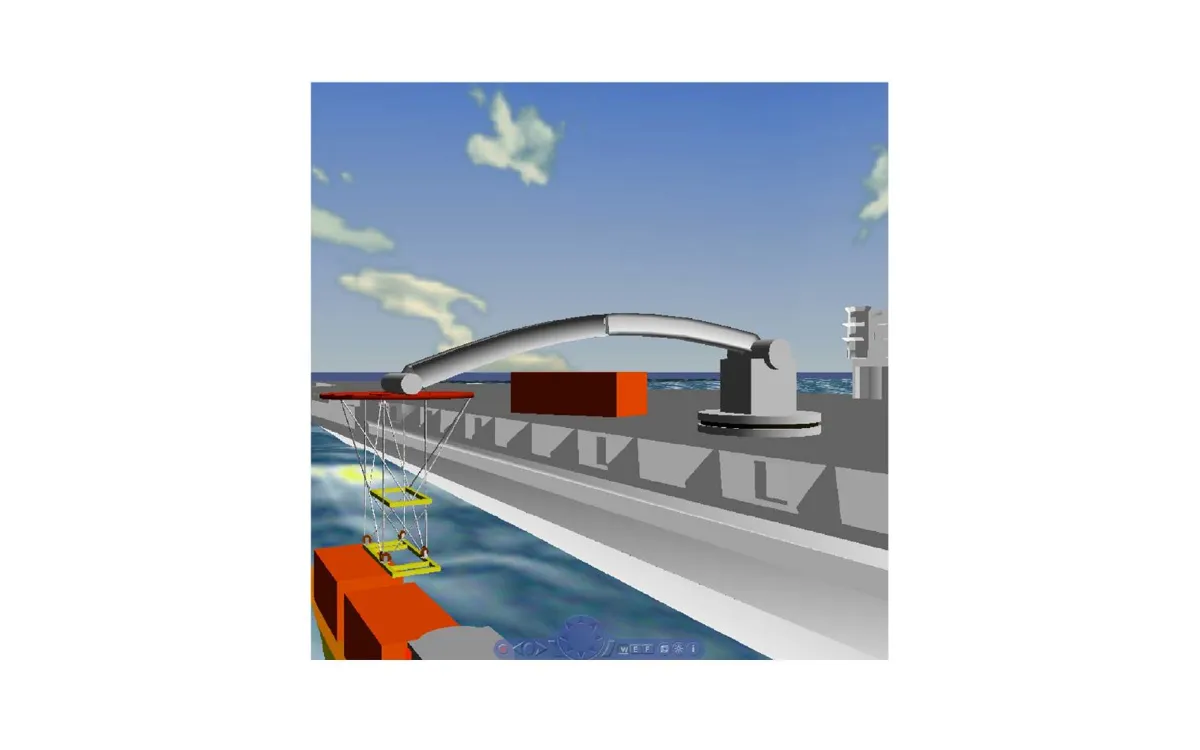
Cable-driven Systems
Robots are designed which are controlled by wires (or cables) in tension. A variety of fundamental questions in terms of design, workspace, control, human training have been addressed.
Overview
Cable actuation has been extensively used in the design of robotic systems. The intrinsic compliance of such systems makes them especially suitable for interactive robots, allowing for safer, lighter, transportable, and/or wearable devices.
Generally, in cable-based robots, each cable is reeled on a pulley connected to the shaft of an electric motor while the other extremity is attached to the end-effector. By properly adjusting cable lengths and tensions, the desired end-effector position and orientation is attained.
The methodology and approaches to design cable-driven systems pose many challenges in achieving an optimal design. The performances at the moving platform are strictly related to cable configuration, which, in turn, depends on the pose of the moving platform. As a result, traditional designs are characterized by the high variability of performance. Part of our work includes the optimization of such systems in order to achieve robust performance which is used in the training and rehabilitation of human motion.
Studies
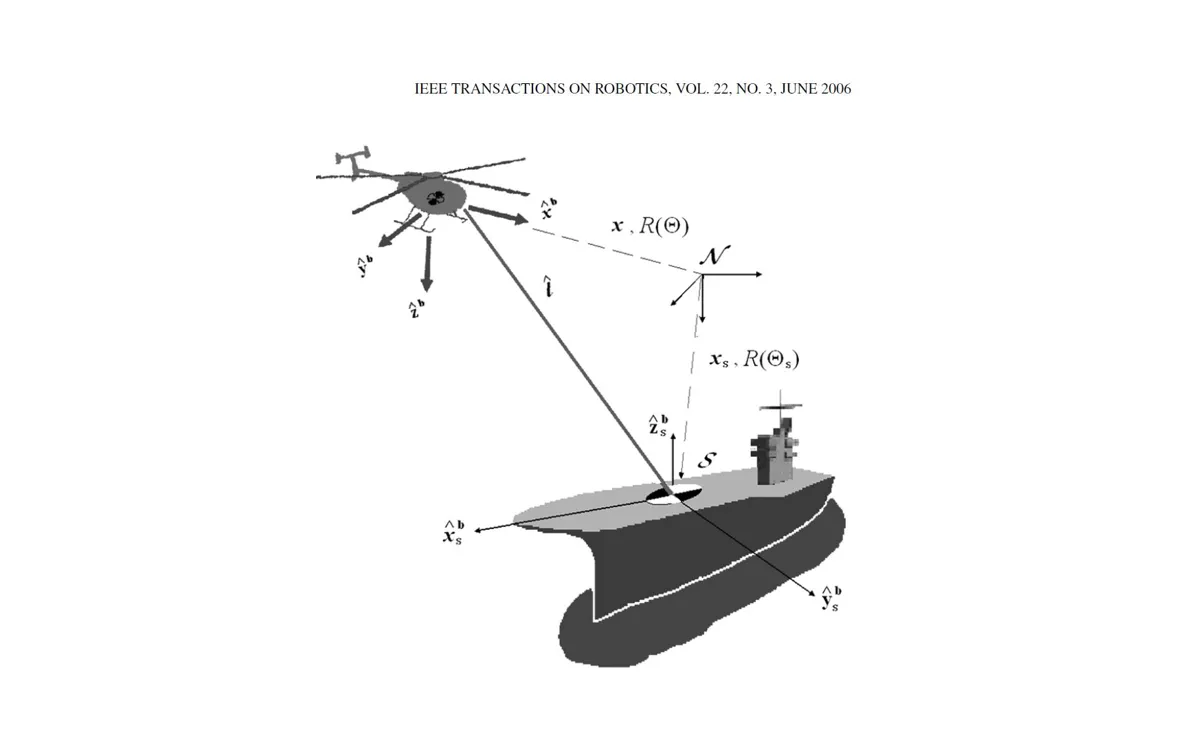
It has been proven that has- degree-of-freedom (n-DOF) single rigid-bodied cable-driven platform requires a minimum of n + 1 cables with positive tension to fully constrain it. However, the force-closure analysis of open chains that are driven by cables is still an open question.
Our research used a systematic approach, based on screw theory, which expresses wrenches acting on the open chain as linear combinations of the reciprocal screws to determine the total required torques at each joint. Our results show that n+1 cables are required to fully constrain the system.
Since cable-driven parallel architectures can only manipulate the end effector in tension, the modeling, workspace, and design analysis of cable robots are different from rigid parallel manipulators. Our methods in optimizing the workspace, and thus the performance, of cable driven systems, include analytically determining the Wrench Closure Workspace and using the workspace area and isotropicity of the manipulator as objective functions to optimize the design parameters.
The feedback control of cable-suspended robots more challenging than their counterpart parallel-actuated robots because the end effector can only be pulled into a pose. In the case with redundant cables, feedback control laws can be designed to make all tensions positive while attaining desired control performance. Considerations we address through our research include
